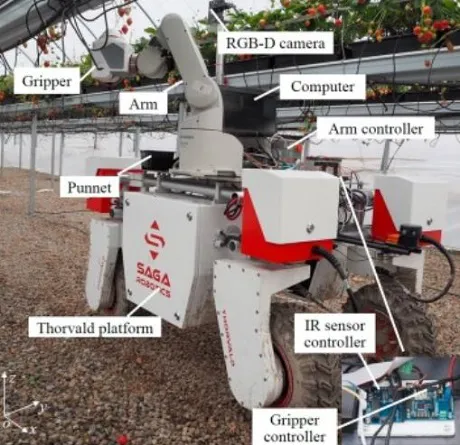
Un equipo de científicos de la Universidad Noruega de Ciencias de la Vida y el Departamento de Ciencias de la Computación de la Universidad de Minnesota han desarrollado y evaluado un robot para la cosecha de fresas cultivadas en túneles en estantes. El robot consiste en una pinza de nuevo diseño fijada sobre un brazo industrial que, a su vez, está fijado a una base móvil junto con una cámara RGB-D. La nueva pinza accionada por cable puede abrir los dedos para "tragarse" la fruta. Dado que está diseñada para agarrar la fruta y no el tallo, solo le hace falta detectar la fruta para recolectarla. La pinza es resistente a los errores de localización del módulo de visión y tiene un recipiente interno que se utiliza para almacenar las berries durante la recolección.
Puesto que el manipulador no tiene que ir adelante y atrás entre cada fresa y existe un cesto separado, el tiempo de recolección se reduce significativamente. El sistema de visión selecciona las fresas maduras y accesibles. Los componentes están integrados en un sistema completo cuyo funcionamiento se analiza comenzando con los cuatro errores principales del sistema de visión: no detección, detección doble, localización imprecisa y fallo de segmentación. La integración permite al robot cosechar de manera continua moviendo la plataforma con una palanca de control.
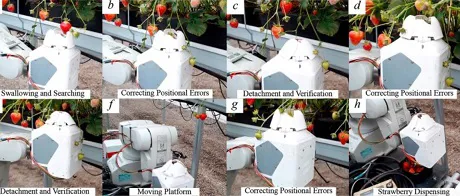
El sistema ha sido evaluado en campo y se han analizado los incidentes de fallo. El tiempo de recolección es de 7,5 segundos, con una tasa de éxito del 53,6% en la finca. La mayoría de los errores se producen en la recolección de fresas en racimos, donde el algoritmo de detección y la pinza tienen problemas para separar las fresas.
Fuente: Ya Xiong, Cheng Peng, Lars Grimstad, Pål Johan From, Volkan Isler, 'Development and field evaluation of a strawberry harvesting robot with a cable-driven gripper', 2019, Computers and Electronics in Agriculture, vol. 157, páginas 392-402.