"Se está produciendo una transición a nivel mundial en lo que respecta a la mano de obra, lo que también explica por qué la gente ya no quiere trabajar en los invernaderos. Se trata de una transición social en la que intervienen la educación, las máquinas y los robots. Estamos orgullosos de formar parte de esa transición", afirma Dror Erez, de Automato Robotics. El objetivo de la empresa es poner la mano de obra robótica a disposición de los productores en invernaderos pasivos. Al centrarse en los invernaderos modernos multitúnel, esperan llevar su solución de cosecha rápidamente al mercado, lo cual es crucial, teniendo en cuenta que la presión en el mercado laboral es alta.

¿Trabajo autónomo o minimizado?
"Un invernadero totalmente autónomo parece una solución perfecta, pero no creemos que sea una realidad en un futuro próximo. Incluso una cosechadora robotizada necesita alguien que la supervise. En otras palabras, siempre será necesaria la mano de obra humana, lo que también refleja la transición que se está produciendo a nivel mundial, creemos. La gente ya no quiere hacer el tipo de trabajo duro que hay en los invernaderos. Queremos ayudarles a convertirse en operadores de máquinas", explica Dror. "Intentamos minimizar el trabajo necesario en el invernadero y, al mismo tiempo, hacer de él un lugar mejor para trabajar. Ese es nuestro principal objetivo, más que hacer que el invernadero sea totalmente autónomo".
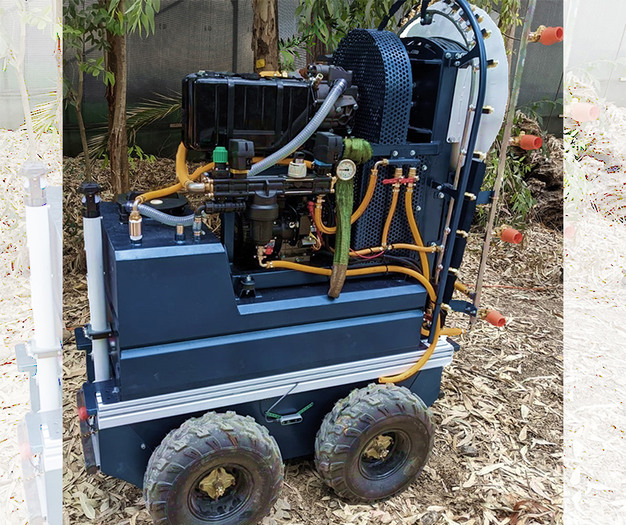
La empresa ha desarrollado una plataforma robótica que puede conducir en invernaderos pasivos (sin calefacción), un mercado que, según explica Dror, domina la agricultura de invernadero (85% de la superficie) y que se enfrenta a retos similares en todo el mundo. "Ya sea en España, México u otros países, la escasez de mano de obra está empeorando en todas partes". La plataforma robótica tiene varias capacidades: mapeo, autoconducción en las hileras y en el paso central. "Sabe cómo operar en el invernadero. Permanece activa día y noche, y puede transportar diferentes cargas útiles, lo que permite al agricultor racionalizar su operación y reducir las dificultades laborales".
Soluciones de montaje
Sobre esta plataforma robótica se pueden montar varias soluciones: una solución de pulverización, una solución de polinización o, incluso, su robot de cosecha. Desarrollar un robot de este tipo es toda una aventura, agrega Dror: "Tener un robot que coseche tomates de forma segura y los descargue en cajas es un proyecto a largo plazo. Al principio teníamos un prototipo, del que mejoramos los brazos, las cámaras y los algoritmos. Luego conseguimos ponerlo en nuestra plataforma autónoma y empezamos un ensayo de cosecha en Israel, tras el cual pasamos a la siguiente fase de prueba: un piloto de cosecha en un invernadero comercial en España".
Al formar parte del programa H2020 Agrobofood, que incluye una subvención y apoyo territorial (por parte de DIH Tecnova), la empresa llevó a cabo un exitoso piloto de cosecha en España en los invernaderos de uno de los dos mayores productores privados del sur del país: Perichan. "Perichan es un ejemplo de empresa privada de cultivo de tomate a gran escala. La mano de obra es un gran reto para ellos, ya que los salarios están subiendo mientras los trabajadores están cada vez menos disponibles, como en todo el mundo. Todo lo que pueda ayudarles a soportar la falta de mano de obra es muy apreciado. Y además, son un socio maravilloso".
Proceso paso a paso
¿Y cómo fue el proceso? "Llevamos el proceso paso a paso", comparte Dror desde su casa en España, a la que se trasladó a principios de año para estar en primera fila con cada prueba. "Para que el robot sea interesante desde el punto de vista comercial, tenemos que acelerar la tasa de recogida y mejorar la tasa de acierto: un tomate tiene que ser cosechado también cuando está parcialmente cubierto, o cuando está cerca del alambre". Inicialmente, explica que querían hacer robots que no exigieran a los productores modernizar o cambiar sus instalaciones. "Aquí hay invernaderos tradicionales y otros más nuevos en los que los tallos no se doblan sobre el alambre, por lo que no cubren los frutos. Los invernaderos tradicionales son mucho más complicados porque el entorno es mucho más selvático. Empezamos nuestros experimentos en los tradicionales, nuestro próximo experimento será en una instalación más moderna de multitúnel". Eso les permitirá acelerar la fase de desarrollo. "Y vemos que hay un proceso en marcha en España de sustitución de los invernaderos tradicionales por otros nuevos, con multitúnel, un proceso que también apoya el Gobierno. El desarrollo es continuo y se da en todo el mundo, por lo que decidimos comercializar un producto para invernaderos multitúnel antes que para los tradicionales".

Robot de polinización
Además, hay más cosas en proyecto. Dado que la plataforma autónoma puede utilizarse para múltiples soluciones, Automato Robotics también pudo montar el robot de polinización Arugga en su plataforma. "A diferencia de nuestros otros productos, este se diseñó para invernaderos activos con calefacción, y estamos colaborando con Arugga para adaptarlo a invernaderos pasivos utilizando nuestra plataforma autónoma. Será una nueva vía para nosotros y ciertamente interesante, ya que siempre buscamos aportar más valor al agricultor", expresa Dror.
Al mismo tiempo, la reducción de la mano de obra necesaria en los invernaderos pasivos sigue siendo una de sus prioridades. "Creemos en el futuro de la cosecha robotizada y seguiremos desarrollándola. Sin embargo, la necesidad de reducir la demanda de mano de obra en los invernaderos es urgente, por lo que nos centramos en otras soluciones para abordar esa cuestión también. Por ejemplo, el pulverizador autónomo es una aplicación muy deseada por los agricultores y esperamos lanzarlo en algunos meses".
Para más información:
Automato Robotics
17 Yahalom Street
Beit Yehoshua
4059100
+972 547684989
www.automatorobotics.com









