Investigadores de la ETH Zürich llevan unos dos años trabajando en la automatización de la recolección de tomates. El objetivo del proyecto es desarrollar un robot recolector moderno con tecnología basada en la robótica, el procesamiento de imágenes y la inteligencia artificial (IA) que pueda utilizarse en el futuro también con otros productos. Till Karbacher, investigador de la ETH, explicó recientemente en un seminario cuál es la situación actual y presentó los resultados de las investigaciones realizadas hasta la fecha.

El trabajo en el invernadero de tomates suele constar de dos fases: la recolección y envasado de los frutos y la defoliación de las tomateras. Karbacher explica que "por término medio, se necesita un total de 2.815 horas de trabajo al año para cultivar una hectárea. Un robot, en cambio, se mantiene operativo durante 4.246 horas al año, también para trabajo nocturno. Extrapolando, un solo robot recolector puede gestionar la producción de 1,5 hectáreas, lo que lo hace capaz de sustituir a 3,5 empleados".
También es una innovación con base científica, afirma Karbacher. La tecnología ha requerido dos años de investigación en la ETH para la correcta identificación de objetos finos. Esta exhaustiva investigación ha sido financiada, en gran parte, por Innosuisse R&D. "No cabe duda de que el trabajo de investigación está dando sus frutos. Gracias al procesamiento de imágenes y a la IA, el robot recolector ya consigue recoger los tomates por el tallo, por lo que se evita que la pinza dañe los frutos. Además, también hemos conseguido desarrollar tecnología para diversas tareas en el invernadero. El siguiente paso sería el enganche del tallo a la cuerda de soporte".

IA y control avanzados 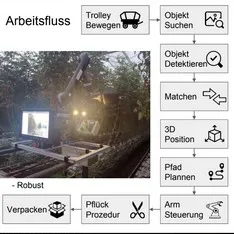 Para completar la instalación en el invernadero, se ha estado estudiando una posible expansión del prototipo de Trolley, prosigue Karbacher. Eso requerirá algunos retoques en aspectos como el brazo y los instrumentos, las cámaras y el sistema de desplazamiento, así como en el ordenador y el software. Según Karbacher, el sistema de embalaje también necesita algunos ajustes para garantizar el rendimiento óptimo del robot.
Para completar la instalación en el invernadero, se ha estado estudiando una posible expansión del prototipo de Trolley, prosigue Karbacher. Eso requerirá algunos retoques en aspectos como el brazo y los instrumentos, las cámaras y el sistema de desplazamiento, así como en el ordenador y el software. Según Karbacher, el sistema de embalaje también necesita algunos ajustes para garantizar el rendimiento óptimo del robot.
Derecha: Vista del flujo de trabajo del robot recolector
El investigador también señala el papel clave de la IA avanzada y las amplias bases de datos (que incluyen fotos RGB en color). "La tecnología altamente optimizada e integrada permite un rendimiento óptimo en milisegundos. El control avanzado queda patente, entre otros aspectos, en los controles de admisibilidad y la solidez del sistema".
Manipulador colgante para recolección en fruticultura y viticultura
Además del recolector de tomates, los investigadores de la ETH también han desarrollado un robot recolector para uvas y otras frutas. Gracias a un manipulador colgante, es posible cosechar uvas y frutas de forma casi autónoma, subraya Karbacher. "El manipulador colgante, instalado sobre cuatro postes, es capaz de acceder al huerto desde arriba. El método neutro en CO₂ y accionamiento solar es apto para pendientes de hasta 45°, por lo que resulta óptimo para instalaciones en superficies accidentadas".

El recolector de fruta con manipulador colgante
Fotos: ETH Zurich - Robotic Systems Lab (RSL)
Para más información:
Till Karbacher
ETH Zürich - Robotic Systems Lab (RSL)
Stampfenbachstrasse 69
8092 Zúrich
Tel.: +41 446338493
[email protected]
www.floatingrobotics.com