La agricultura es una industria donde los márgenes son bajos y la rentabilidad y la eficiencia en tiempo son temas fundamentales. La puesta en marcha de un sistema robótico permitiría ciertas ventajas como una mano de obra más flexible y actividad nocturna. Además, los robots se deben desarrollar para trabajar en condiciones duras y en entornos altamente inciertos y desconocidos.
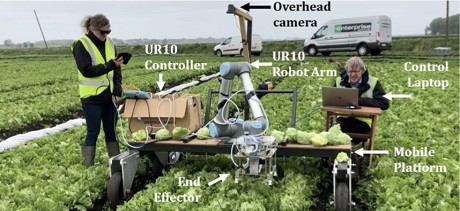
Un reto en concreto es la manipulación para la cosecha robótica autónoma. Los ingenieros de la Universidad de Cambridge han desarrollado un sistema para automatizar la cosecha de la lechuga iceberg. En comparación con otros productos, la iceberg es difícil de cosechar porque el cultivo resulta dañado fácilmente por la manipulación y es muy difícil de detectar visualmente. Una plataforma llamada Vegebot ha sido desarrollada para permitir el desarrollo iterativo y la prueba en campo de la solución, que comprende un sistema de visión, un efector final a medida y un software. Se ha desarrollado un sistema de visión y aprendizaje que utiliza dos redes neuronales convolucionales integradas para lograr la clasificación y la localización. Se ha desarrollado un efector final a medida para que la cosecha se produzca sin daños.
"Los objetivos eran lograr una localización y clasificación robustas, conseguir un ciclo temporal comparable al humano y evitar daños en las lechugas cosechadas. La localización y la clasificación han sido razonablemente robustas, como demuestra un éxito de localización del 91% y una precisión de clasificación del 82% probada en una serie de datos de prueba significativos. El ciclo temporal medio de Vegebot (31,7 s) ha sido restringido por el peso del efector final y, por tanto, ahora es más lento que los humanos, pero se podría mejorar fácilmente utilizando materiales más ligeros. Pese a que la tasa de éxito de cosecha ha sido alta (88,2%), la tasa de daños ha sido mala (38%); se necesita seguir trabajando para reducir la tasa de daño y se necesita mayor optimización para satisfacer los estándares de los supermercados", explican los científicos.
Aunque las técnicas y enfoques se han aplicado a la lechuga iceberg, los conceptos descritos se podrían aplicar a otras situaciones de cosecha y agricultura robótica. Seguir trabajando en la investigación de una mayor aplicabilidad y desarrollar un sistema de cosecha más universal aumentarían el impacto comercial e investigador.
Fuente: Simon Birrell, Josie Hughes, Julia Y. Cai, Fumiya Iida, 'A field‐tested robotic harvesting system for iceberg lettuce', 2019, Journal of Field Robotics.